
暫態的進階世界:振盪、過衝與晶片的速度極限
從一階萬用公式到二階 RLC 的阻尼分析,再到 RC 延遲如何定義現代處理器的時脈上限
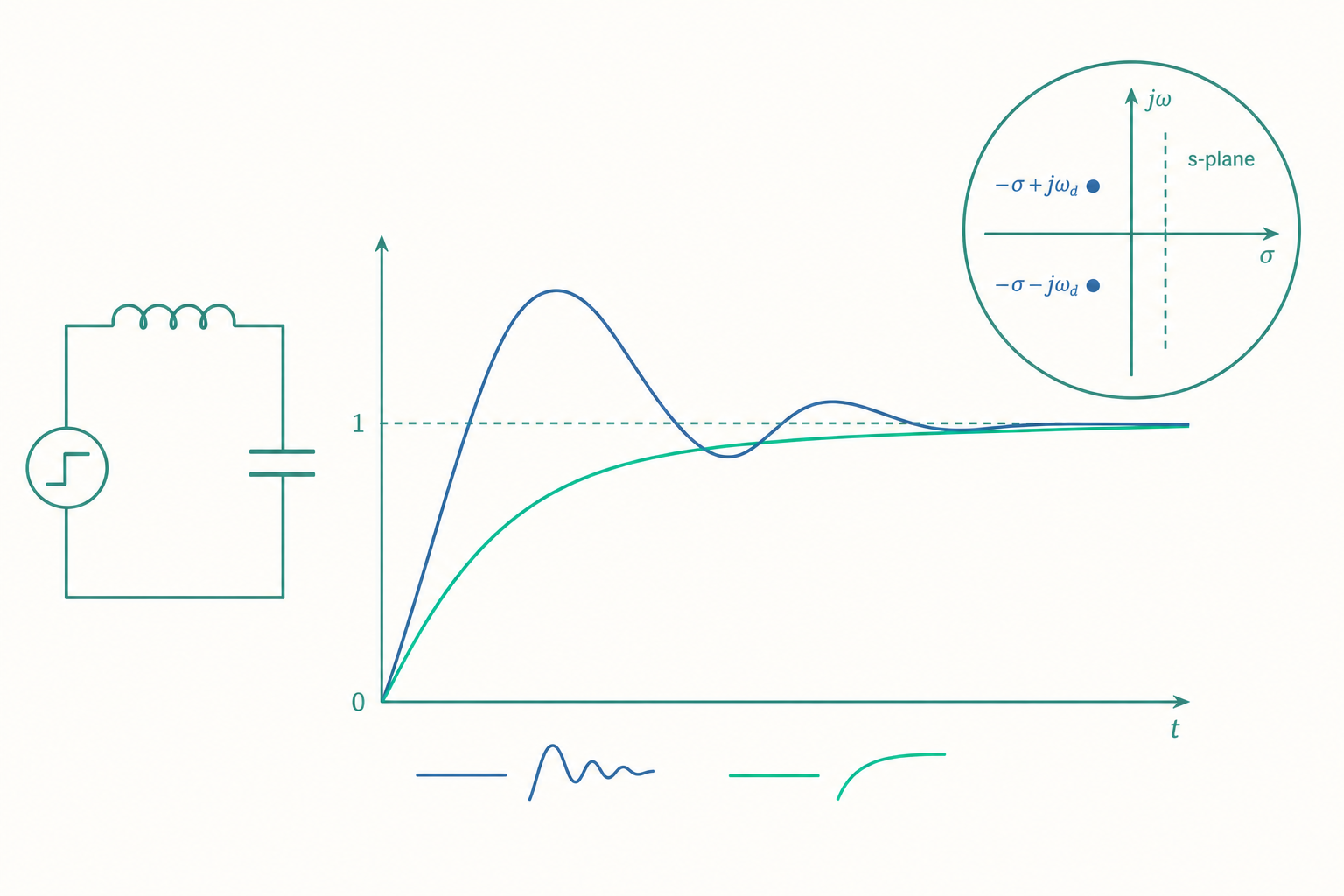
開關彈一下,電容上卻冒出比電源更高的電壓——怎麼回事?
入門篇我們學會了那條漂亮的指數曲線:電容慢慢充、$5\tau$ 充飽、$\tau = RC$。但真實電路裡的暫態(transient)往往沒這麼乖。換一個情境:一個電感原本通著穩定電流,你把開關一彈,電感為了維持電流,竟然在另一條支路上「逼出」一個遠高於電源的電壓尖峰;或者一個 RLC 迴路被踢一下,電容電壓不是單調爬升,而是來回振盪好幾圈才安定。這些都不是入門那條單調指數曲線能描述的。
這篇進階篇要做三件事:第一,把一階電路從「死背公式」升級成一套對任何初始條件都成立的通用解法;第二,認真面對二階 RLC 的振盪、過衝與安定時間,這是控制與訊號完整性的核心;第三,談談這些暫態在數位電路與電源切換裡如何決定晶片的速度極限與安全邊界。如果你已經讀過入門,這裡就是把直覺變成工程武器的地方。
一階電路的「萬用公式」:別再背充電與放電兩條式子
入門篇給了你充電 $v_C(t)=V_s(1-e^{-t/\tau})$ 和放電 $v_C(t)=V_0 e^{-t/\tau}$ 兩條式子。但如果電容一開始就帶有某個電壓 $V_0$,最後又要趨近某個非零的穩態值 $V_\infty$,這兩條都不夠用。其實它們是同一條更一般式子的特例:
$$ x(t) = x(\infty) + \big[x(0^+) - x(\infty)\big]\,e^{-t/\tau} $$
這裡 $x$ 可以是任何一階電路裡的電容電壓或電感電流。這條式子的威力在於,你只需要回答三個問題,完全不必重新解微分方程:
- 初始值 $x(0^+)$:開關動作「剛剛之後」的瞬間值。靠的是連續性鐵則——電容電壓與電感電流不能瞬間跳變,所以 $v_C(0^+)=v_C(0^-)$、$i_L(0^+)=i_L(0^-)$。
- 穩態終值 $x(\infty)$:時間夠久後($t\to\infty$),電容當「開路」、電感當「短路」,用直流分析求出最終值。
- 時間常數 $\tau$:把獨立電源歸零(電壓源短路、電流源開路),從電容或電感「往外看」整個電阻網路的戴維寧等效電阻 $R_{\text{th}}$,則 $\tau = R_{\text{th}}C$ 或 $\tau = L/R_{\text{th}}$。
第三點是很多人入門時的盲點:時間常數裡的 $R$ 不是某一顆電阻,而是電容/電感所「看見」的整個網路的等效電阻。電路再複雜,只要它是一階線性電路,這三步永遠成立。
動手算一下:帶初始電壓、且終值非零的 RC 切換
一個 $9\ \text{V}$ 電源透過 $R_1 = 2\ \text{k}\Omega$ 對 $C = 100\ \mu\text{F}$ 充電很久,電容已充飽。在 $t=0$ 時,我們把電源換成 $3\ \text{V}$,並同時讓電容透過 $R_1 = 2\ \text{k}\Omega$ 與另一顆對地的 $R_2 = 2\ \text{k}\Omega$ 形成分壓。求 $v_C(t)$。
第一步,初始值。 切換前電容充飽到 $9\ \text{V}$,且電壓不能跳變:
$$ v_C(0^+) = v_C(0^-) = 9\ \text{V} $$
第二步,終值。 $t\to\infty$ 時電容開路,電流只流經 $R_1$、$R_2$ 串聯分壓,電容電壓等於 $R_2$ 上的分壓:
$$ v_C(\infty) = 3 \times \frac{R_2}{R_1+R_2} = 3 \times \frac{2}{2+2} = 1.5\ \text{V} $$
第三步,時間常數。 把 $3\ \text{V}$ 電源短路後,從電容往外看,$R_1$ 與 $R_2$ 變成並聯:
$$ R_{\text{th}} = R_1 \parallel R_2 = \frac{2\times 2}{2+2} = 1\ \text{k}\Omega,\qquad \tau = R_{\text{th}}C = (1\times10^3)(100\times10^{-6}) = 0.1\ \text{s} $$
組裝萬用公式:
$$ v_C(t) = 1.5 + (9 - 1.5)\,e^{-t/0.1} = 1.5 + 7.5\,e^{-10t}\ \text{(V)} $$
注意這條曲線是從 $9\ \text{V}$ 往下衰減到 $1.5\ \text{V}$——既不是純充電也不是純放電,但萬用公式一次搞定。驗算 $t=0$ 得 $9\ \text{V}$、$t\to\infty$ 得 $1.5\ \text{V}$,吻合。
切換瞬間的能量帳:那 50% 跑去哪了
入門很少談的一個深刻事實:用電壓源透過電阻對一個完全沒電的電容充飽,無論電阻多大,電阻上耗散的能量永遠等於最終存進電容的能量——也就是說,能量轉換效率恆為 50%,與 $R$ 無關。
證明很短。電容最終儲存的能量是 $E_C = \tfrac{1}{2}CV_s^2$。充電過程中流過電阻的總電荷是 $Q = CV_s$,而電源送出的總能量是 $W_{\text{src}} = V_s Q = CV_s^2$。電源送出 $CV_s^2$,電容只留下一半,另一半 $\tfrac{1}{2}CV_s^2$ 全被電阻燒掉了:
$$ E_R = W_{\text{src}} - E_C = CV_s^2 - \tfrac{1}{2}CV_s^2 = \tfrac{1}{2}CV_s^2 $$
這個結果令人意外的地方在於:把 $R$ 調到很小(充電很快)並不能省下這份損耗——它只是讓同樣多的能量在更短的時間、用更大的電流瞬間燒掉。這正是為什麼大型積體電路每次時脈翻轉、對節點電容充放電都會發熱,總功耗約為 $P \approx \alpha\, f\, C\, V^2$($\alpha$ 是翻轉活動率、$f$ 是頻率)。要真正提高充電效率、突破這 50% 天花板,必須改用電感式(切換式)電源,讓能量在磁場與電場間轉移而非單純被電阻消耗——這也是切換式電源供應器(SMPS)效率能做到 90% 以上的根本原因。
二階 RLC:當暫態學會「振盪」
入門篇末尾點到了二階 RLC,這裡我們把它展開成可以實際操作的工具。串聯 RLC 受階躍電壓激勵時,電容電壓滿足
$$ \frac{d^2 v_C}{dt^2} + 2\alpha\frac{dv_C}{dt} + \omega_0^2\, v_C = \omega_0^2\, V_s $$
其中衰減係數 $\alpha = \dfrac{R}{2L}$、自然諧振角頻率 $\omega_0 = \dfrac{1}{\sqrt{LC}}$。特徵方程 $s^2 + 2\alpha s + \omega_0^2 = 0$ 的根
$$ s_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2} $$
決定了整個暫態的「性格」。比較 $\alpha$ 與 $\omega_0$(等價於比較阻尼比 $\zeta = \alpha/\omega_0$ 與 1)會得到三種截然不同的響應:
| 情形 | 條件 | 特徵根 | 行為 |
|---|---|---|---|
| 過阻尼(overdamped) | $\zeta>1$ | 兩相異負實根 | 緩慢單調趨近,最慢 |
| 臨界阻尼(critically damped) | $\zeta=1$ | 重根 $-\alpha$ | 不振盪下最快安定 |
| 欠阻尼(underdamped) | $\zeta<1$ | 共軛複根 $-\alpha\pm j\omega_d$ | 衰減振盪、有過衝 |
欠阻尼時出現阻尼振盪角頻率 $\omega_d = \sqrt{\omega_0^2 - \alpha^2}$,響應形如
$$ v_C(t) = V_s + e^{-\alpha t}\big(A\cos\omega_d t + B\sin\omega_d t\big) $$
電壓會衝過終值再回頭、來回擺盪幾次才安定。這就是開頭那個「電容電壓比電源還高」的數學根源——欠阻尼系統的過衝(overshoot)可以讓暫態峰值超過穩態值。
看一個例子:判斷阻尼類型並算阻尼頻率
設串聯 RLC 中 $R = 20\ \Omega$、$L = 1\ \text{mH}$、$C = 1\ \mu\text{F}$。
算兩個關鍵頻率:
$$ \omega_0 = \frac{1}{\sqrt{LC}} = \frac{1}{\sqrt{(10^{-3})(10^{-6})}} = \frac{1}{\sqrt{10^{-9}}} \approx 3.16\times10^{4}\ \text{rad/s} $$
$$ \alpha = \frac{R}{2L} = \frac{20}{2\times10^{-3}} = 1\times10^{4}\ \text{rad/s} $$
因為 $\alpha < \omega_0$,所以是欠阻尼,會振盪。阻尼比
$$ \zeta = \frac{\alpha}{\omega_0} = \frac{10^4}{3.16\times10^4} \approx 0.316 $$
阻尼振盪頻率
$$ \omega_d = \sqrt{\omega_0^2 - \alpha^2} = \sqrt{(3.16\times10^4)^2 - (10^4)^2} \approx 3.0\times10^4\ \text{rad/s} $$
估過衝量。 對標準二階系統,最大過衝百分比只取決於阻尼比:
$$ M_p = \exp\!\left(\frac{-\pi\zeta}{\sqrt{1-\zeta^2}}\right) = \exp\!\left(\frac{-\pi(0.316)}{\sqrt{1-0.316^2}}\right) \approx \exp(-1.046) \approx 0.35 $$
也就是說,電容電壓的第一個峰值會超過穩態值約 35%。若 $V_s = 5\ \text{V}$,峰值約衝到 $6.75\ \text{V}$——這正是為什麼數位走線的振鈴(ringing)會讓訊號短暫超過供電電壓,可能誤觸發或損傷下游閘極。要壓低過衝,得加大 $R$(提高阻尼)或調整 $L$、$C$,把 $\zeta$ 往 $0.7$ 附近推(工程上常見的折衷點,兼顧速度與過衝)。
階躍響應的工程語言:上升時間、安定時間、振鈴
工程師描述暫態時很少直接丟微分方程,而是用幾個規格參數:
- 上升時間(rise time, $t_r$):輸出從 10% 爬到 90% 所需時間。對一階 RC,可推得 $t_r \approx 2.2\,\tau$(因為 $\ln 9 \approx 2.197$)。這是判斷一條走線或一級放大器能不能跟上時脈的直接指標。
- 安定時間(settling time, $t_s$):輸出進入並維持在終值 $\pm2\%$(或 $\pm5\%$)範圍所需時間。對一階約 $4\tau$(到 $\pm2\%$),對欠阻尼二階約 $t_s \approx 4/\alpha$。
- 過衝(overshoot)與振鈴:欠阻尼才有,由 $\zeta$ 主宰。
這些參數把「時間常數」這個單一數字擴展成一整套可量測、可驗收的指標。值得注意的是,一階系統永遠不會過衝(它沒有可以「來回交換能量」的兩種儲能元件),所以只要你在示波器上看到振鈴,背後一定藏著至少二階的動態——常常是設計者沒料到的寄生電感與電容湊成的 RLC。
暫態如何決定數位晶片的速度上限
在數位世界裡,一條金屬走線連到下一級閘極,本質上就是一個 RC 網路:走線的電阻 $R$ 串著閘極輸入電容與走線對地電容 $C$。每次邏輯從 0 翻到 1,其實是在對這個 $C$ 充電,電壓爬升服從我們熟悉的指數曲線。判定「邏輯 1 成立」需要電壓爬過某個門檻(例如 $V_{DD}$ 的一半),這段等待時間就是閘極延遲(gate delay),量級正比於 $RC$。
這帶出一個深刻的縮放難題:當晶片製程把線寬縮小,走線變細使單位長度電阻上升、走線變密又使耦合電容上升,於是互連 RC 延遲反而成為先進製程的瓶頸,甚至超過電晶體本身的開關速度。業界因此引入低電阻的銅製程取代鋁、用低介電常數(low-$k$)材料降低 $C$,本質上都是在和這條暫態曲線的 $\tau = RC$ 搏鬥。你在入門篇學的那個 $\tau$,正是現代處理器時脈頻率上限背後最樸素的物理。
重點回顧
- 一階萬用公式 $x(t)=x(\infty)+[x(0^+)-x(\infty)]e^{-t/\tau}$ 取代了死背充放電兩條式;只需求初始值、終值、與從儲能元件「往外看」的戴維寧等效電阻決定的 $\tau$。
- 用電阻對電容充飽的能量效率恆為 50%,與 $R$ 無關;要突破得靠電感式切換電源。
- 二階 RLC 依 $\zeta=\alpha/\omega_0$ 分為過阻尼、臨界阻尼、欠阻尼三型;只有欠阻尼會振盪與過衝,過衝量 $M_p=e^{-\pi\zeta/\sqrt{1-\zeta^2}}$ 只取決於阻尼比。
- 工程上用上升時間($\approx 2.2\tau$)、安定時間、過衝等規格描述暫態;示波器上看到振鈴代表電路實際是二階(常含寄生 $L$、$C$)。
- 數位晶片的閘極與互連延遲本質上是 RC 暫態,$\tau=RC$ 是時脈頻率上限的物理根源。
深入探討(研究所視角)
把暫態分析推到一般框架,最自然的語言是狀態空間(state-space)與拉普拉斯轉換(Laplace transform)。一個含 $n$ 個獨立儲能元件的線性電路,其動態可寫成 $\dot{\mathbf{x}} = \mathbf{A}\mathbf{x} + \mathbf{B}u$,狀態向量 $\mathbf{x}$ 由各電容電壓與電感電流組成。系統矩陣 $\mathbf{A}$ 的特徵值(eigenvalues)就是電路的自然頻率(natural frequencies),等同於轉移函數的極點(poles)。每個極點 $s_i = \sigma_i + j\omega_i$ 貢獻一個模態 $e^{\sigma_i t}\cos(\omega_i t + \phi)$:實部 $\sigma_i$ 給出衰減率(其倒數即該模態的時間常數),虛部 $\omega_i$ 給出振盪頻率。系統穩定的充要條件是所有極點位於複數 $s$ 平面左半部($\sigma_i<0$)。
這個視角讓「時間常數」與「頻率響應」、「穩定性」統一起來。把元件換成複頻域阻抗 $Z_R=R$、$Z_L=sL$、$Z_C=1/(sC)$,整個微分方程化為代數方程,轉移函數 $H(s)$ 的分母根即極點。極點越靠近虛軸,衰減越慢、暫態拖得越久;極點是一對靠近虛軸的共軛複數時,系統欠阻尼、響應振鈴。對二階系統,極點到原點的距離即 $\omega_0$、與負實軸夾角的餘弦即阻尼比 $\zeta$——於是 $s$ 平面上極點的位置一眼就能讀出過衝與安定時間。
更進一步,欠阻尼 RLC 與力學阻尼振子精確同構(電荷↔位移、$L$↔質量、$1/C$↔彈簧勁度、$R$↔黏滯阻尼),其能量在電場與磁場間來回交換、被 $R$ 逐週期耗散。共振銳度由品質因數 $Q = \dfrac{\omega_0 L}{R} = \dfrac{1}{R}\sqrt{\dfrac{L}{C}} = \dfrac{1}{2\zeta}$ 量化。高 $Q$ 對濾波器與振盪器是優點(選擇性好、相位雜訊低),但對數位訊號完整性卻是災難(振鈴久久不退)。同一個極點圖,在通訊工程師眼中是「好的諧振腔」,在數位設計師眼中卻是「要被阻尼壓死的寄生迴路」——而連接這兩種世界觀的,始終是那條最初的指數暫態曲線。