
運算放大器進階:當理想模型開始說謊
從增益頻寬積、迴轉率到相位裕度與雜訊地板,理解真實運算放大器的非理想特性與穩定度設計
當「理想運算放大器」開始說謊
在入門篇裡,我們把運算放大器(operational amplifier, op-amp)當成一位完美的助手:輸入阻抗無限大、輸出阻抗為零、開迴路增益無限大、頻寬無限寬。靠著「虛短路(virtual short)」與「虛斷路(virtual open)」兩條黃金法則,我們閉著眼睛就能算出反相放大器的增益是 $-R_f/R_1$。
可是當你把一個增益 100 的放大器接上示波器,在 1 MHz 的方波輸入下,輸出卻變成歪斜的三角波;或者你做了一個本該輸出 0 V 的精密積分器,幾秒鐘後輸出竟然自己飄到飽和;又或者你照書接了一個跟隨器,結果它在輸出端掛上長線後開始自我振盪——這時候,那位「完美助手」開始對你說謊了。
進階篇要談的,正是這些謊言背後的真相:真實運算放大器的非理想特性(non-idealities)、頻率響應與穩定度(frequency response & stability),以及如何用工程語言把這些限制量化、設計、馴服。讀完之後,你看資料手冊(datasheet)那密密麻麻的參數表時,每一個數字都會變成有意義的設計約束。
有限增益與增益頻寬積:頻率才是真正的主角
入門篇假設開迴路增益 $A_{OL} \to \infty$。真實的運算放大器在直流(DC)確實有非常大的增益(典型 $10^5$ 到 $10^6$,即 100 至 120 dB),但它隨頻率快速衰減。
絕大多數通用型運算放大器內部刻意做成單極點主導(dominant-pole)的補償結構,使開迴路增益近似為:
$$A_{OL}(s) = \frac{A_0}{1 + s/\omega_p}$$
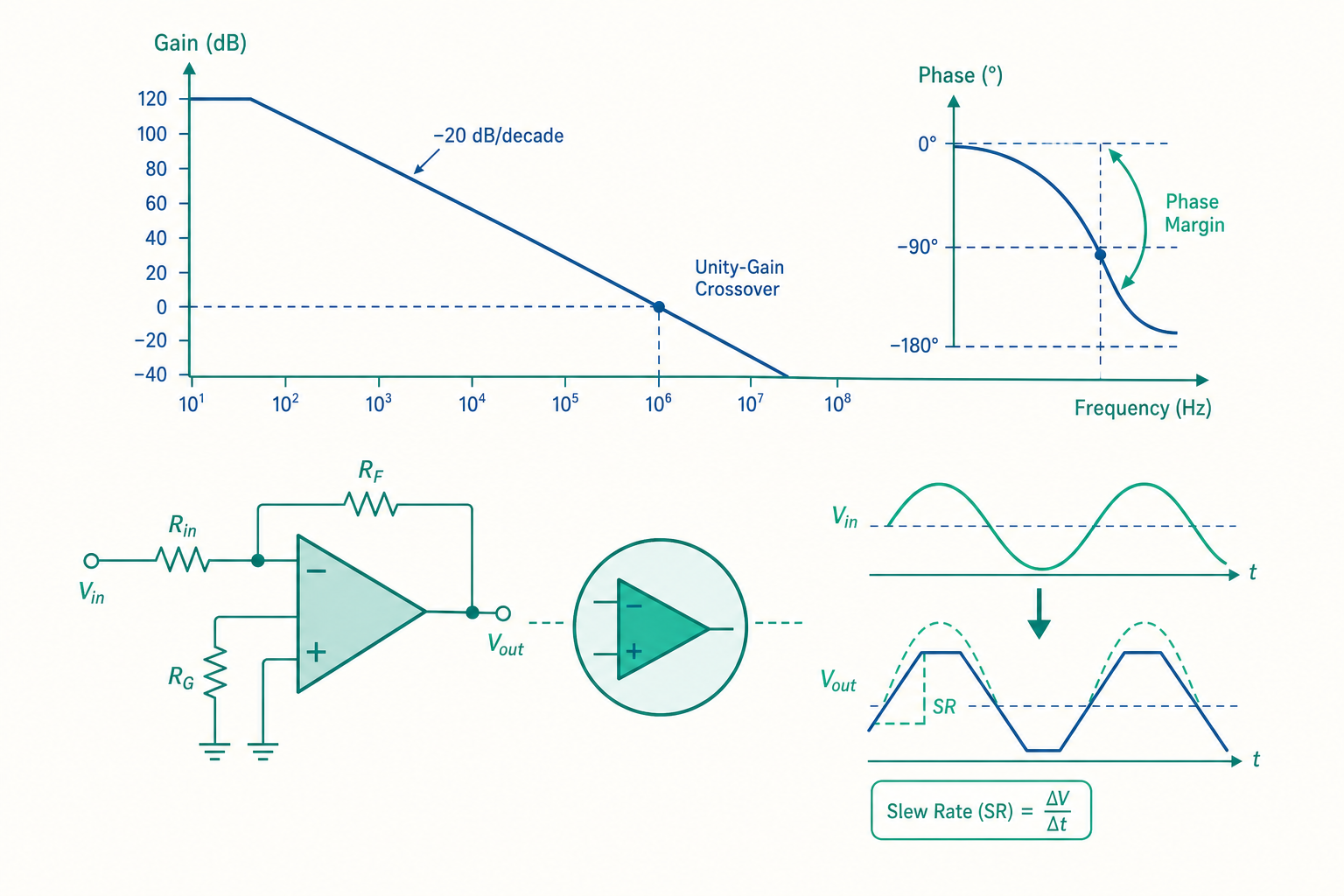
其中 $A_0$ 是直流開迴路增益,$\omega_p$ 是主極點角頻率(typically 只有幾 Hz 到幾十 Hz)。這條曲線在波德圖(Bode plot)上以 $-20\,\text{dB/decade}$ 的斜率下降,直到增益降為 1(0 dB)的頻率,我們稱之為單位增益頻寬(unity-gain bandwidth) $f_t$。
關鍵性質來了:對單極點系統,增益與頻寬的乘積是常數,這就是著名的增益頻寬積(Gain-Bandwidth Product, GBW):
$$\text{GBW} = A_0 \cdot f_p = A_{CL} \cdot f_{3\text{dB}} \approx f_t$$
意思是:當你用負回授把閉迴路增益 $A_{CL}$ 設高,可用頻寬 $f_{3\text{dB}}$ 就等比例變窄。一顆 GBW = 10 MHz 的運算放大器,做成增益 100 的放大器時,$-3\,\text{dB}$ 頻寬只剩 100 kHz;做成增益 1000 時,只剩 10 kHz。增益不是免費的,你是用頻寬去換的。
看一個例子:閉迴路增益誤差
考慮一個非反相放大器,理想閉迴路增益 $A_{CL,\text{ideal}} = 1 + R_f/R_1 = 100$。回授因子(feedback factor)為 $\beta = R_1/(R_1+R_f) = 1/100 = 0.01$。
精確的閉迴路增益其實是:
$$A_{CL} = \frac{A_{OL}}{1 + A_{OL}\beta} = \frac{A_{OL,\text{ideal}}}{1 + 1/T}$$
其中 $T = A_{OL}\beta$ 稱為迴路增益(loop gain)。假設在訊號頻率下 $A_{OL} = 10^4$(80 dB),則:
$$T = 10^4 \times 0.01 = 100$$
$$A_{CL} = \frac{100}{1 + 1/100} = 100 \times \frac{1}{1.01} \approx 99.0$$
相對誤差約 $-1\%$。這個誤差稱為增益誤差(gain error),它正比於 $1/T$。迴路增益 $T$ 越大,閉迴路行為越接近理想。
但別忘了 $A_{OL}$ 隨頻率掉。若訊號到了某頻率使 $A_{OL}$ 降到 $10^3$,則 $T = 10$,增益誤差跳到約 $-9\%$。所以高精度應用要追求「整個工作頻帶內都維持高迴路增益」——這就是為什麼精密放大常選 GBW 遠大於需求的元件。
迴轉率:大訊號下的另一道牆
GBW 描述的是小訊號頻率行為。但若你給一個大振幅、高頻率的訊號,會撞上另一面完全不同的牆:迴轉率(slew rate, SR)。
迴轉率定義為輸出電壓能變化的最大速率,單位 V/μs:
$$\text{SR} = \left.\frac{dv_{out}}{dt}\right|_{\max}$$
它的物理根源在於內部補償電容 $C_c$ 只能被有限的內部偏壓電流 $I_{\max}$ 充放電:$\text{SR} = I_{\max}/C_c$。一旦輸出需要的變化速率超過 SR,運算放大器就「跟不上」,輸出變成斜率固定的斜坡——這就是你看到正弦波被削成三角波的原因。
對振幅 $V_p$、頻率 $f$ 的正弦輸出 $v_{out} = V_p \sin(2\pi f t)$,其最大斜率出現在過零點:
$$\left.\frac{dv_{out}}{dt}\right|_{\max} = 2\pi f V_p$$
要求不失真,必須 $2\pi f V_p \le \text{SR}$。由此導出全功率頻寬(full-power bandwidth, FPBW):
$$f_{FPBW} = \frac{\text{SR}}{2\pi V_p}$$
動手算一下:小訊號頻寬 vs. 大訊號頻寬
某運算放大器 GBW = 10 MHz、SR = 0.5 V/μs。我們要輸出 $\pm 10\,\text{V}$($V_p = 10\,\text{V}$)的正弦波,做成單位增益跟隨器。
小訊號頻寬看起來有 10 MHz。但全功率頻寬只有:
$$f_{FPBW} = \frac{0.5 \times 10^6\,\text{V/s}}{2\pi \times 10\,\text{V}} = \frac{5\times10^5}{62.8} \approx 7.96\,\text{kHz}$$
也就是說,想要 10 V 振幅不被 slew 限制,頻率不能超過約 8 kHz——比小訊號頻寬足足低了三個數量級!這是初學者最常踩的坑:用 GBW 估算後以為頻寬夠,實際大訊號下卻嚴重失真。 高速 DAC 重建、影音訊號、PWM 解調這類應用,SR 往往比 GBW 更致命。
輸入失調、偏壓電流與漂移:直流精度的敵人
理想運算放大器兩輸入相等時輸出為零。真實元件因內部差動對(differential pair)電晶體不完全匹配,存在輸入失調電壓(input offset voltage) $V_{OS}$,典型從廉價品的數 mV 到精密品的 μV 等級。它會被閉迴路的雜訊增益(noise gain) $1+R_f/R_1$ 放大後出現在輸出。
同時,輸入端電晶體需要輸入偏壓電流(input bias current) $I_B$ 才能工作。這股電流流過外部電阻會產生壓降,貢獻額外的輸出誤差。兩輸入偏壓電流之差為輸入失調電流(input offset current) $I_{OS}$。
輸出總直流誤差可寫成(非反相組態、源阻抗對稱化後):
$$V_{out,\text{err}} = \left(1+\frac{R_f}{R_1}\right)V_{OS} + R_f \, I_{OS} \quad(\text{已用平衡電阻抵消 } I_B \text{ 共模項})$$
這裡有個經典技巧:在非反相輸入串一個等於 $R_1 \parallel R_f$ 的電阻,讓兩輸入看到相同的源阻抗,使共模的 $I_B$ 在兩端產生相同壓降而相互抵消,剩下的只有失配項 $I_{OS}$(通常比 $I_B$ 小一個數量級)。
更麻煩的是這些量都會隨溫度漂移(drift):$V_{OS}$ 的溫漂以 μV/°C 計,$I_B$ 對雙極性輸入(BJT input)隨溫上升、對 FET 輸入則大致每升溫 10°C 翻倍。對於要在工業溫度範圍內維持精度的儀表,溫漂往往比室溫失調更難處理。斬波穩零(chopper-stabilized / auto-zero)放大器就是為了把 $V_{OS}$ 與其漂移壓到 nV/°C 等級而生。
穩定度與相位裕度:負回授如何變成正回授
到此都還是「精度」問題。接下來談「會不會炸」的問題——穩定度(stability)。
負回授的核心是迴路增益 $T(s) = A_{OL}(s)\beta(s)$。系統穩定的關鍵在於:當 $|T| = 1$(0 dB)時,迴路的相位移離 $-180°$ 還有多遠。這個餘量叫相位裕度(phase margin, PM):
$$\text{PM} = 180° + \angle T(j\omega_c), \quad \text{其中 } |T(j\omega_c)| = 1$$
直覺是:負回授本身先天有 $180°$(反相)。若訊號繞迴路一圈又額外累積了 $180°$ 相移,回授就從「負」變成「正」,在 $|T|=1$ 處滿足振盪條件(Barkhausen criterion),電路自我振盪。
- 單極點最多貢獻 $-90°$,所以單極點系統永遠穩定(PM ≥ 90°)。這正是內部補償運算放大器刻意做成單極點主導的理由。
- 但只要回授路徑或負載引入第二個極點(例如容性負載 $C_L$ 與輸出阻抗 $R_o$ 形成的極點 $1/(2\pi R_o C_L)$),相位就會再往下掉,PM 縮小。
- 工程慣例:PM ≥ 45° 才算可接受,PM ≈ 60° 是兼顧速度與阻尼的甜蜜點(對應步階響應約 5% 過衝、近乎臨界阻尼)。PM 太小(如 < 30°)會出現嚴重振鈴(ringing),趨近 0° 則振盪。
看一個例子:容性負載逼近不穩定
某運算放大器輸出阻抗 $R_o = 50\,\Omega$,你在輸出端接了一段同軸電纜,等效容性負載 $C_L = 1\,\text{nF}$。這會在迴路中引入一個極點:
$$f_{p2} = \frac{1}{2\pi R_o C_L} = \frac{1}{2\pi \times 50 \times 1\times10^{-9}} \approx 3.18\,\text{MHz}$$
如果這顆元件的單位增益頻率 $f_t$ 也在 MHz 等級,這第二極點就落在迴路增益還大於 1 的頻段內,額外注入逼近 $-90°$ 的相移,PM 被吃掉一大半。結果就是跟隨器在接上電纜後開始振鈴甚至振盪。
解法是「隔離 + 回授補償」:在輸出與 $C_L$ 之間串一個小電阻 $R_{iso}$(如 $20\sim50\,\Omega$),把負載極點推到迴路外;或在回授路徑加一個小電容 $C_f$ 製造一個零點(zero),在 $|T|=1$ 之前補回相位(這稱為回授超前補償,lead compensation)。零點 $f_z = 1/(2\pi R_f C_f)$ 提供 $+90°$,正好抵銷掉一個極點的相位損失。
一個常被忽略的迷思:「跟隨器(unity-gain buffer)最穩定,因為增益最小。」恰恰相反——單位增益意味著 $\beta = 1$、迴路增益最大、頻寬最寬,於是把高頻的寄生極點都納入了 $|T|>1$ 的範圍。許多運算放大器標明「unity-gain stable」正是因為不是每顆都能在 $\beta=1$ 下穩定;有些「decompensated」元件只保證在增益 ≥ 5 或 ≥ 10 時穩定,換來更高的 GBW。
雜訊:精度的最終地板
當失調與漂移都校正掉之後,限制你能分辨多小訊號的,是雜訊(noise)。運算放大器的雜訊主要有兩個來源:
- 輸入電壓雜訊密度 $e_n$(單位 $\text{nV}/\sqrt{\text{Hz}}$):在串聯路徑上,乘以雜訊增益後出現在輸出。
- 輸入電流雜訊密度 $i_n$(單位 $\text{pA}/\sqrt{\text{Hz}}$):流過源阻抗 $R_s$ 產生 $i_n R_s$ 的電壓雜訊。
加上電阻本身的熱雜訊(Johnson–Nyquist noise) $e_R = \sqrt{4kTR}$,三者在「功率」上不相關、以均方根(RMS)方式正交相加:
$$e_{n,\text{total}} = \sqrt{e_n^2 + (i_n R_s)^2 + 4kTR_s}\quad(\text{單位 } \text{nV}/\sqrt{\text{Hz}})$$
要得到實際輸出雜訊(V rms),需對頻寬積分。對單極點系統,等效雜訊頻寬(noise bandwidth) 比 $-3\,\text{dB}$ 頻寬寬約 $\pi/2$ 倍:
$$\text{BW}_n = \frac{\pi}{2} f_{3\text{dB}} \approx 1.57\, f_{3\text{dB}}$$
這透露一個重要設計觀念:頻寬越寬,吸進來的雜訊越多。 若你的訊號只有 1 kHz,就別讓電路頻寬開到 1 MHz——多出來的頻寬只是在收集雜訊。這也是為什麼精密量測常在最後一級加低通濾波器限頻。
此外,低頻段還有 $1/f$ 雜訊(flicker noise / 粉紅雜訊),其功率密度隨頻率下降而上升,有一個轉角頻率(corner frequency) $f_c$。在 $f_c$ 以下 $1/f$ 主導,以上則由白雜訊地板主導。DC 與超低頻量測(如熱電偶、應變計)特別受 $1/f$ 折磨,這又是斬波放大器大顯身手之處——它把訊號調變到 $1/f$ 轉角之上再解調,避開了粉紅雜訊區。
重點回顧
- 增益頻寬積(GBW) 是單極點補償運算放大器的鐵律:閉迴路增益每提高一倍,可用頻寬就減半($A_{CL}\cdot f_{3\text{dB}}\approx f_t$)。
- 迴轉率(SR) 是大訊號的獨立限制,與 GBW 無關。全功率頻寬 $f_{FPBW}=\text{SR}/(2\pi V_p)$ 往往遠低於小訊號頻寬,是大振幅高頻應用的真正瓶頸。
- 直流誤差來自 $V_{OS}$、$I_B$、$I_{OS}$ 及其溫漂;用平衡源阻抗抵消 $I_B$ 共模項,用自動歸零放大器壓制 $V_{OS}$ 與 $1/f$ 雜訊。
- 穩定度由相位裕度(PM)決定:單極點先天穩定,第二極點(尤其容性負載)會啃掉 PM;PM ≈ 60° 是甜蜜點,可用隔離電阻或回授超前補償補救。
- 雜訊地板由 $e_n$、$i_n R_s$、電阻熱雜訊正交相加而成,並對雜訊頻寬($\approx 1.57\,f_{3\text{dB}}$)積分;限頻是降雜訊的第一手段,$1/f$ 轉角以下需特殊技術。
深入探討(研究所視角)
1. 二階閉迴路的根軌跡與阻尼。 把運算放大器近似為雙極點 $A_{OL}(s)=A_0/[(1+s/\omega_{p1})(1+s/\omega_{p2})]$,閉迴路特徵方程 $1+A_{OL}(s)\beta=0$ 是標準二階系統。其阻尼比 $\zeta$ 與相位裕度有近似對應 $\text{PM}\approx 100\zeta$(度),且過衝 $M_p=\exp(-\pi\zeta/\sqrt{1-\zeta^2})$。把 PM 設計問題映射到 $\zeta$ 與步階響應,是控制理論與類比電路的交會點,也是 Miller 補償(在第二級跨接補償電容,利用米勒效應放大等效電容並造成極點分裂,pole splitting)的理論基礎。
2. 米勒補償與右半平面零點。 兩級運算放大器的 Miller 電容雖然把主極點往低頻推、次極點往高頻推(pole splitting)以改善 PM,卻同時在右半平面(RHP) 引入一個零點 $z_{RHP}=g_{m2}/C_c$。RHP 零點增加增益卻減少相位,是穩定度的隱形殺手。現代設計用串接歸零電阻(nulling resistor) 或 電流緩衝(cascode / Ahuja 補償) 把零點移到左半平面或無窮遠,這是類比 IC 設計(如教科書 Razavi、Gray-Meyer)的核心議題。
3. 雜訊的功率譜與最佳源阻抗。 將總輸入參考雜訊對 $R_s$ 求極值,可得雜訊匹配的最佳源阻抗 $R_{s,opt}=e_n/i_n$,此時放大器的雜訊指數(noise figure) 最低。這解釋了為何低源阻抗感測器要選低 $e_n$ 的雙極性輸入運算放大器,而高源阻抗(如光電二極體、pH 電極)要選低 $i_n$ 的 FET / CMOS 輸入元件。把 $e_n$、$i_n$、$f_c$ 一起放進設計,就是低雜訊類比前端(analog front-end)的選型方法論。
4. CMRR 與 PSRR 的頻率相依性。 共模拒斥比(CMRR)與電源拒斥比(PSRR)在資料手冊裡常只給 DC 值,但兩者都隨頻率以約 $-20\,\text{dB/decade}$ 衰減。在高頻、有電源漣波(如開關電源 ripple)的環境,這意味著電源雜訊會大量灌入訊號路徑。儀表放大器(instrumentation amplifier)的三運放結構之所以能維持高 CMRR,關鍵在於電阻比例匹配——研究所層級會進一步探討雷射修整(laser trimming)與自動歸零如何把 CMRR 提升到 140 dB 以上,以及它與 $\Delta\Sigma$ ADC 前端整合的系統設計。