
天球與星座(進階):恆星時、均時差,與會漂移的「不動」星空
為什麼鐘錶上的正午太陽幾乎從不在正南方?從恆星日與太陽日的 4 分鐘落差,到時角、均時差、日行跡,再到大氣折射、視差、自行如何撼動「固定恆星」的假象,最後抵達 ICRS/Gaia 的現代天球參考框架。
為什麼正午十二點,太陽幾乎從不在你的正南方?
讀過入門篇後,你已經熟悉天球這個「方便的虛構」:把所有天體投影到一個半徑無限大的球面,用赤經(right ascension, RA)與赤緯(declination, Dec)為每顆星寫下不變的「門牌」。但這套乾淨的圖像,藏著一個會讓初學者困惑的裂縫。
如果你連續一整年、每天在「鐘錶上的正午十二點」走出門,記錄太陽是否恰好位於正南方(即通過你的子午線),你會發現太陽幾乎從來不準時。有時它早到十六分鐘,有時遲到十四分鐘,一年之中只有四天剛好對上。更奇怪的是,如果你把這一整年每天正午太陽的位置疊在同一張照片上,太陽會描出一個橫躺的「8」字形曲線,天文上稱為日行跡(analemma)。
這條 8 字曲線不是觀測誤差,而是天球幾何與我們計時方式之間張力的具體呈現。要真正讀懂它,我們必須把入門篇裡「恆星座標固定不變」的安穩假設,逐一拆開來檢視。這篇進階篇要談的,正是天球與時間、以及天球與真實光線傳播之間,那些被入門簡化掉的精密細節。
兩種「一天」:恆星時與太陽時
問題的根源在於:「一天」其實有兩種定義,而它們並不相等。
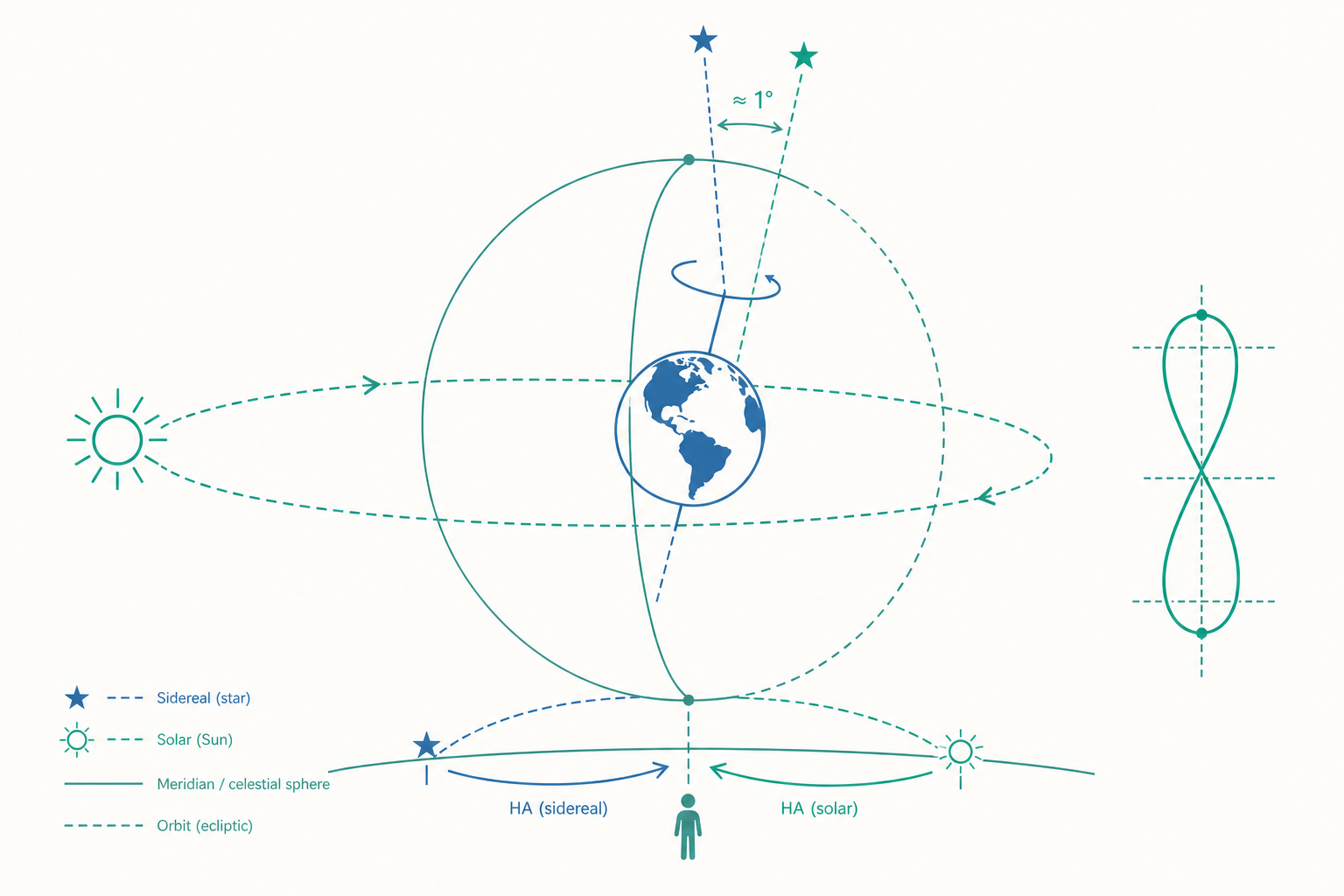
太陽日(solar day) 是我們日常生活的一天——太陽連續兩次通過同一條子午線之間的時間,平均為 $24$ 小時。恆星日(sidereal day) 則是一顆遙遠恆星連續兩次通過同一條子午線之間的時間,約為 $23$ 小時 $56$ 分 $4$ 秒,比太陽日短了約 $4$ 分鐘。
為什麼短?關鍵在於地球同時做兩件事:自轉與公轉。當地球自轉整整一圈(相對於遙遠的恆星),它在公轉軌道上也已經前進了約 $1°$(因為一年 $\approx 365$ 天,每天走 $360°/365 \approx 0.986°$)。此時太陽相對於背景恆星已經移動了一點點,地球必須再多轉約 $1°$,太陽才會重新回到子午線上。多轉這 $1°$ 所需的時間,正是那約 $4$ 分鐘:
$$ \Delta t = \frac{1°}{360°} \times 24^{\mathrm{h}} \approx 4^{\mathrm{m}} $$
這個 $4$ 分鐘的差異,正是入門篇裡「每顆星每天提早約 $4$ 分鐘升起」現象的另一面。從天球座標的角度看,恆星時(sidereal time)才是天球真正的「時鐘」:地方恆星時(local sidereal time, LST) 在數值上等於此刻正通過觀測者子午線的天體赤經。
$$ \text{LST} = \alpha_{\text{子午線上的天體}} $$
這條看似簡單的恆等式,是所有觀測規劃的基石。如果你想拍攝赤經 $\alpha = 18^{\mathrm{h}}37^{\mathrm{m}}$ 的織女星(Vega)讓它高掛在正南方(即過子午線、達到當晚最高點,稱為中天 / 上中天(upper culmination)),你只需查出當地恆星時何時等於 $18^{\mathrm{h}}37^{\mathrm{m}}$ 即可。天文台的牆上往往掛著一具恆星時鐘,原因正在於此——它直接讀出此刻天球轉到了哪裡。
時角:把座標接回正在轉動的天空
入門篇的赤經赤緯是「固定」的,但天空明明在轉。如何把固定的座標,連結到正在轉動的此時此刻?橋樑就是時角(hour angle, $H$):
$$ H = \text{LST} - \alpha $$
時角描述一個天體相對於子午線「已經轉過多少」。$H = 0$ 表示天體正在中天(最高點);$H$ 以時、分、秒計量,每小時對應 $15°$ 的轉動。當 $H = +1^{\mathrm{h}}$,表示天體已經過了子午線、西偏 $15°$;當 $H = -1^{\mathrm{h}}$,表示它還差 $15°$ 才到子午線。
時角讓我們能回答一個非常實際的問題:一顆星今晚會在天上待多久? 對於赤緯 $\delta$、位於緯度 $\phi$ 的觀測者,一顆星升起或落下(仰角 $h = 0$)時的時角 $H_0$,可由地平座標關係式(入門篇深入探討中的那條)在 $h=0$ 時導出:
$$ \cos H_0 = -\tan\phi \tan\delta $$
這條公式威力十足。它告訴我們:
- 當 $-\tan\phi\tan\delta > 1$,方程無解,代表這顆星永不升起(永遠在地平線下)。
- 當 $-\tan\phi\tan\delta < -1$,同樣無解,但代表這顆星永不落下——這正是入門篇講過的拱極星(circumpolar star)的嚴格判據。
- 介於兩者之間時,$H_0$ 給出半個可見弧的長度,乘以 $2$ 再換算成時間,就是這顆星每天在地平線上方停留的時數。
動手算一下:織女星在台灣一晚待多久?
讓我們用織女星實際算一次。取台灣中部緯度 $\phi = +24°$,織女星赤緯 $\delta = +38.8°$。
先算出半弧時角:
$$ \cos H_0 = -\tan(24°)\tan(38.8°) = -(0.445)(0.804) \approx -0.358 $$
$$ H_0 = \arccos(-0.358) \approx 110.97° $$
把角度換算成時間($15° = 1^{\mathrm{h}}$):
$$ H_0 \approx \frac{110.97°}{15°/\mathrm{h}} \approx 7.40^{\mathrm{h}} $$
這是從中天到落下(或從升起到中天)的時間。整晚可見時長為兩倍:
$$ 2 H_0 \approx 14.8^{\mathrm{h}} $$
換句話說,織女星每天有將近 $15$ 小時待在台灣的地平線上方——它是夏季夜空名副其實的常客。相對地,如果你拿一顆赤緯為 $-50°$ 的南天星來算,會得到 $\cos H_0 = -\tan(24°)\tan(-50°) \approx +0.530$,仍有解,可見時長約 $2\times 58° / 15 \approx 7.7^{\mathrm{h}}$,但它升得很低、很短暫。再低一點到 $\delta = -70°$,就會算出無解——那是台灣永遠看不見的天區,南十字座(Crux)的更南方便落在這裡。
這個計算把入門篇定性的「拱極星 / 永不升起」變成了可定量、可預測的判據。一條餘弦公式,就決定了你今晚能不能看到某顆星、又能看多久。
均時差:8 字曲線的真正成因
回到開頭的謎題。我們的鐘錶走的是平均太陽時(mean solar time)——假想一個「平均太陽」以完全均勻的速度沿天球赤道運行,每天剛好 $24$ 小時。但真實太陽(視太陽 / apparent sun)走得並不均勻。真實太陽時與平均太陽時之差,稱為均時差(equation of time):
$$ \text{EoT} = t_{\text{視太陽}} - t_{\text{平均太陽}} $$
均時差一年中在約 $-14$ 分鐘到 $+16$ 分鐘之間擺盪,由兩個獨立效應疊加而成:
其一,軌道離心率(eccentricity)。 地球公轉軌道是橢圓而非正圓,依克卜勒第二定律,地球在近日點(每年一月初)附近走得快、遠日點(七月初)附近走得慢。太陽在黃道上的視運動速度因此隨季節變化,造成約 $\pm 7.7$ 分鐘、週期一年的正弦項。
其二,黃赤交角(obliquity)。 即使太陽沿黃道勻速移動,由於黃道相對於天球赤道傾斜約 $23.5°$,太陽赤經的增加速率仍不均勻:在二至點(solstice)附近,太陽運動幾乎平行於赤道,赤經增加快;在二分點(equinox)附近,運動斜跨赤道,投影到赤經上的分量小。這造成約 $\pm 9.9$ 分鐘、週期半年的項。
兩項疊加,就是那條不對稱、總振幅可達約 $30$ 分鐘的均時差曲線。而日行跡的 8 字之所以是 8 字:橫向的寬窄來自均時差(東西向偏移),縱向的高低來自太陽赤緯隨季節的變化(南北向偏移)。一條曲線,同時編碼了地球軌道的橢圓性與地軸的傾斜——這是天球幾何最優雅的可視化之一。
這也解釋了為何「日出最早」與「日落最晚」並不發生在白晝最長的夏至當天,而是分別錯開數日:均時差讓太陽過子午線的時刻在一年中前後漂移,把對稱的日照圖像扭歪了。
「固定的恆星」其實一直在動
入門篇為了建立清晰圖像,把恆星座標當作不變。但在研究等級的精度下,這個假設會從好幾個方向崩解。天球座標之所以需要嚴謹的定義,正因為下面這些效應都在以角秒(arcsecond, $''$)甚至毫角秒(milliarcsecond, mas)的量級擾動每顆星的視位置。
大氣折射(atmospheric refraction)。 星光進入地球大氣時會被折射,使天體看起來比實際位置「抬高」。在地平線附近,這個抬升量可達約 $34'$——比太陽或月球的視直徑還大!這意味著當你看見太陽的下緣「接觸」地平線時,幾何上太陽其實已經完全落到地平線以下了。所有嚴謹的升落時刻計算,都必須在前述 $\cos H_0$ 公式裡,把「$h=0$」修正為「$h \approx -34'$」(再加上太陽半徑約 $16'$,日出定義常用 $h \approx -50'$)。
周年視差(annual parallax)。 地球繞日公轉,使近距離恆星相對於遙遠背景,在一年中描出一個微小的橢圓。視差角的大小恰好定義了距離單位:
$$ d \text{ (parsec)} = \frac{1}{p \text{ (arcsec)}} $$
最近的恆星比鄰星(Proxima Centauri)視差也僅約 $0.77''$,比一枚硬幣在數公里外張開的角度還小。這正是為什麼古人察覺不到視差,從而長期誤信地球靜止不動——天球的「固定」假象,其實是恆星太遠造成的。
光行差(aberration of light)。 因為光速有限而地球公轉速度不為零(約 $30 \text{ km/s}$),星光的視方向會朝地球運動方向偏移一個小角度,最大約 $20.5''$。這是個純粹的相對運動效應,與恆星距離無關,所有恆星都一起偏。
自行(proper motion)。 恆星在銀河系中各自運動,其在天球上的真實角位置會逐年改變。巴納德星(Barnard's Star)的自行高達每年約 $10.3''$,約 $180$ 年就能移動一個滿月的視直徑。在數萬年的尺度上,連北斗七星的「斗形」都會被自行揉散——星座並非永恆。
把這些效應疊起來,「一顆星此刻在天上的精確方向」就成了一個需要層層修正的工程問題:從不變的天球參考系座標,依序加上歲差、章動、光行差、視差、自行、大氣折射,才得到望遠鏡此刻該指向的地平座標。
重點回顧
- 恆星日比太陽日短約 $4$ 分鐘,因為地球自轉一圈的同時也在公轉前進約 $1°$;天球真正的時鐘是恆星時,且 LST 等於正在中天之天體的赤經。
- 時角 $H = \text{LST} - \alpha$ 把固定座標接回轉動的天空;由 $\cos H_0 = -\tan\phi\tan\delta$ 可定量算出任一恆星的可見時長,並嚴格判定拱極星與永不升起的天區。
- 均時差源於地球軌道離心率(年週期項)與黃赤交角(半年週期項)的疊加,使視太陽與鐘錶時相差達約 $\pm 15$ 分鐘,並描繪出 8 字形日行跡。
- 在研究精度下,恆星座標並非固定:大氣折射(地平線附近約 $34'$)、周年視差(定義 parsec)、光行差(約 $20.5''$)、自行(巴納德星每年約 $10.3''$)都會擾動視位置。
- 從「不變座標」到「望遠鏡此刻的指向」,需要依序疊加歲差、章動、光行差、視差、自行與折射等修正。
深入探討(研究所視角)
從動態天球到 ICRS:為什麼現代天文不再以地軸定義座標
入門篇與本文至此用的赤道座標,本質上是動態(dynamical) 參考系:它的基準是地球的赤道平面與春分點,而這兩者都因歲差、章動而緩慢移動。這帶來一個哲學上的尷尬——我們用一個一直在抖動的物理系統(地球自轉軸),去定義一個本應穩固的座標格網。每隔一段時間就必須重新指定曆元(epoch),如 B1950.0、J2000.0,並在不同曆元間做繁複換算。
現代天文學的解法,是把座標系的定義徹底與地球解耦。國際天球參考系(International Celestial Reference System, ICRS)不再以地球赤道為基準,而是以一組遙遠的類星體(quasar) 的方向為錨點。這些類星體距離達數十億光年,其自行小到無法測量,提供了一個近乎絕對靜止的「天球釘樁」。透過甚長基線干涉測量(Very Long Baseline Interferometry, VLBI),射電天文學家以毫角秒精度測定數百個類星體的方向,構成國際天球參考框架(ICRF)。ICRS 的座標軸方向被選為與 J2000.0 動態系統盡量一致,但其定義不再隨時間漂移——歲差與章動在 ICRS 中變成了「地球相對於固定天球如何擺動」的可建模量,而非座標系本身的瑕疵。
光學波段的對應實現,則來自歐洲太空總署的 Gaia 任務。Gaia 以前所未有的精度(亮星可達約 $20$ 微角秒)測量了超過十億顆恆星的位置、視差與自行,把 ICRF 的射電框架延伸到光學恆星,並反過來提供了測繪銀河系三維結構與運動學的空前資料集。可以說,入門篇那個「抹去深度」的天球,到了 Gaia 手中,深度(視差距離)與運動(自行、徑向速度)被一一恢復,二維的投影重新長回了六維的相空間。
球面三角的代數骨架:旋轉矩陣與四元數
本文與入門篇用的座標轉換公式(地平 $\leftrightarrow$ 赤道),本質上都是球面上的旋轉。在現代天測軟體中,這些轉換不再以三角恆等式逐條套用,而是統一表述為三維旋轉矩陣的連乘。把天體方向寫成單位向量 $\hat{\mathbf{r}} = (\cos\delta\cos\alpha,\ \cos\delta\sin\alpha,\ \sin\delta)$,則從一個參考系到另一個的變換就是:
$$ \hat{\mathbf{r}}' = \mathbf{R}\,\hat{\mathbf{r}}, \qquad \mathbf{R} = \mathbf{R}_z(\theta_3)\,\mathbf{R}_x(\theta_2)\,\mathbf{R}_z(\theta_1) $$
其中各 $\mathbf{R}$ 為繞特定軸的基本旋轉矩陣。歲差、章動、地球自轉、極移(polar motion)各自對應一個(或一組)旋轉矩陣,IAU 2006/2000A 模型便是把這整串矩陣標準化的成果。實務上為避免萬向鎖(gimbal lock)與累積誤差,高精度系統常改用四元數(quaternion) 或旋轉向量來表示姿態——這也是 Gaia 衛星本體姿態控制與資料歸算的數學語言。
於是,從一個古希臘人想像出來的虛構球面,我們一路走到了類星體錨定的慣性參考框架、十億顆恆星的微角秒測量、以及四元數描述的衛星姿態。天球從未是「正確」的物理實體——但正因為它是一個定義清晰、可逐層精修的數學鷹架,它至今仍是人類丈量宇宙方向最深刻的起點。